
FOC学习笔记(一)—-框架
所谓FOC就是矢量控制,通过使用基本矢量使用伏秒平衡原则合成任意角度的矢量,由此可以实现对电机的任意控制,包括电流(力矩),位置,速度等。
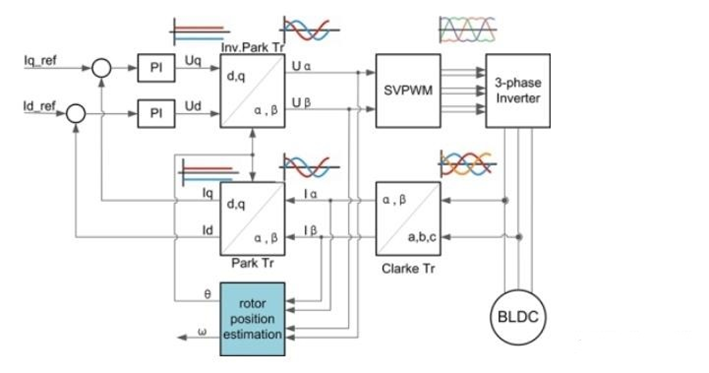
简述FOC控制过程,从电机的三相定子绕组通过采样电阻或电流互感器采样得到定子绕组的电流,最少要采集两相的电流,另外一项可以由基尔霍夫电流定理计算得出。
注:电机在稳定旋转的时候电机内部由定子绕组产生的磁场应该是一个旋转的圆形磁场,要产生固定频率旋转的圆形磁场,就需要三相在空间上互差120度的定子绕组内通入在时间相位上互差120度的三相对称正弦波电流。
采样得到三相电流之后,通过一次Clark坐标变换,把电流从ABC三相坐标系转换到α-β两相坐标系下,减少一个变量(Iα,Iβ),但此时得到的两个变量仍然是正弦规律变换的量,在我们使用PID控制器跟踪的时候仍然有较大的难度。
所以,经过Clark变换之后,再做一次Park变换,所谓Park变换是从静止坐标系变换到旋转坐标系,也就是DQ坐标系,由于DQ坐标系是跟随转子进行旋转的,如此一来就把正弦变化的规律转移到坐标系上面去了,在此坐标系下,原本两个正弦规律变换的量就被拉直了(Id,Iq),这样就便于PID控制器进行控制跟踪。
Id和Iq输入到PID控制器,经过PID控制器之后,计算得到dq坐标系下的电压(Ud,Uq),然后dq坐标系下的电压再次经过一次反Park变换,回到α-β坐标系下(Uα,Uβ)。
注:经过数次坐标变换的目的就是简化变量,便于控制,但直接控制电机的还是三相交流,所以在完成控制器的控制之后,再次通过反变换回到三相坐标系。
得到Uα和Uβ后,输入到SVPWM模块,通过SVPWM模块进行扇区判断和矢量作用时长的计算,去合成任意方向的矢量,通过SVPWM输出六路PWM去控制三相逆变电路输出三相电压,在定子中产生三相对称电流,控制电机旋转。
接下来的文章中,我会逐步实现整个FOC的控制方式,包括理论分析数学计算,matlab仿真,嵌入式硬件平台代码实现。
下集预告—–坐标变换之Clark变换