
FOC学习笔记(三)—-坐标变换之Park变换
一、理论分析:
与Clark变换不同的是,Park变换不是三相到两相的变换,而是静止两相坐标系到旋转两相坐标系的变换,在上一节的Clark变换中,我们得到的变换结果是两相正弦信号。正弦信号对于我们控制来说,比如PID跟踪仍然是困难的,Park变换就是解决这个问题,Park变换之后的坐标系是d-q坐标系,与α-β坐标系不同的是,d-q坐标系是跟随转子旋转的坐标i,这样就相当于把正弦信号的变换转移到坐标系本身了,所以在d-q坐标系下我们应该看到两个恒定的信号,把正弦信号拉直了。
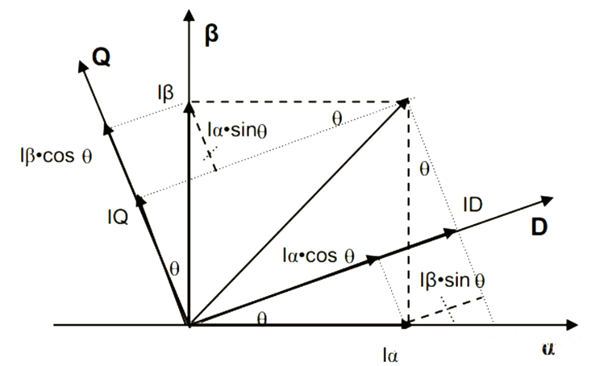
如上图所示,d-q坐标系与α-β坐标系直接夹角θ,此θ是随转子转动的,应该注意的是,Park变换和后面讲的反Park变换中所需要传入的角度θ都是电角度而非转子的机械角度。接下来开始进行数学的分析:
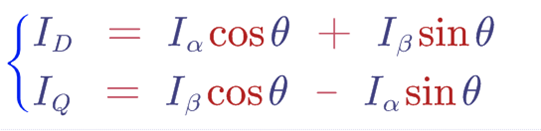
我们把α和β轴上的 Iα ,Iβ通过正交分解,分解到d-q坐标轴上去,Iα在d轴上的分量 = Iαcosθ,Iβ在d轴上的分量 = Iβsinθ,Iα在q轴上的分量 = -Iαsinθ,Iβ在d轴上的分量 = Iβcosθ,综上可以得到如下结果:
二、Matlab仿真
这就是Park变换的数学模型了,接下来通过Matlab仿真查看一下变换结果:
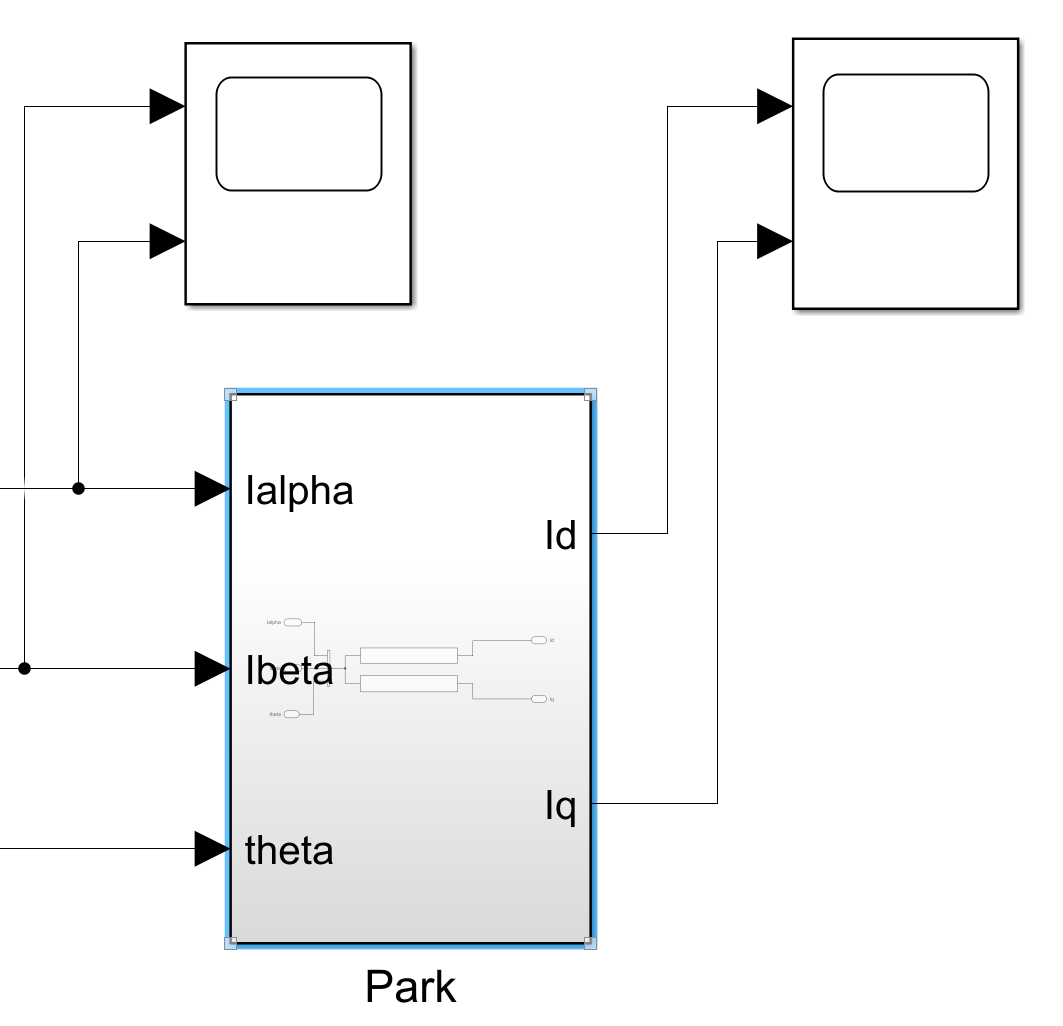
创建Park变换的子系统
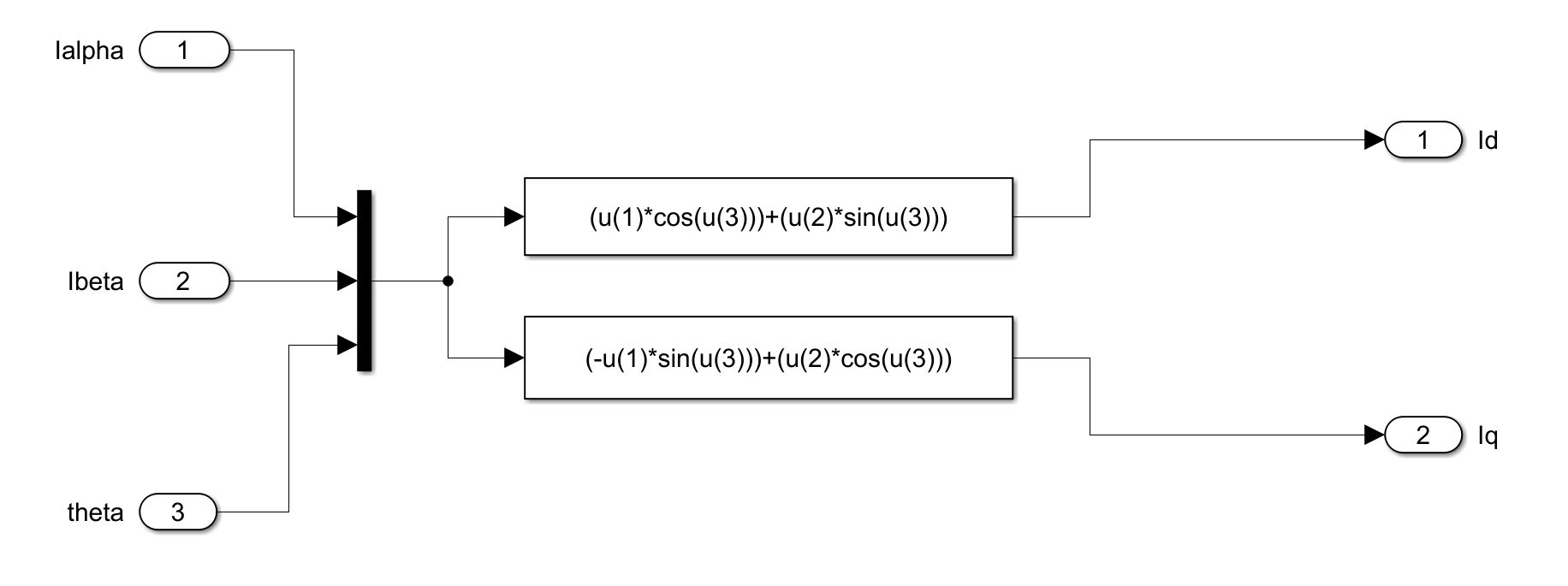
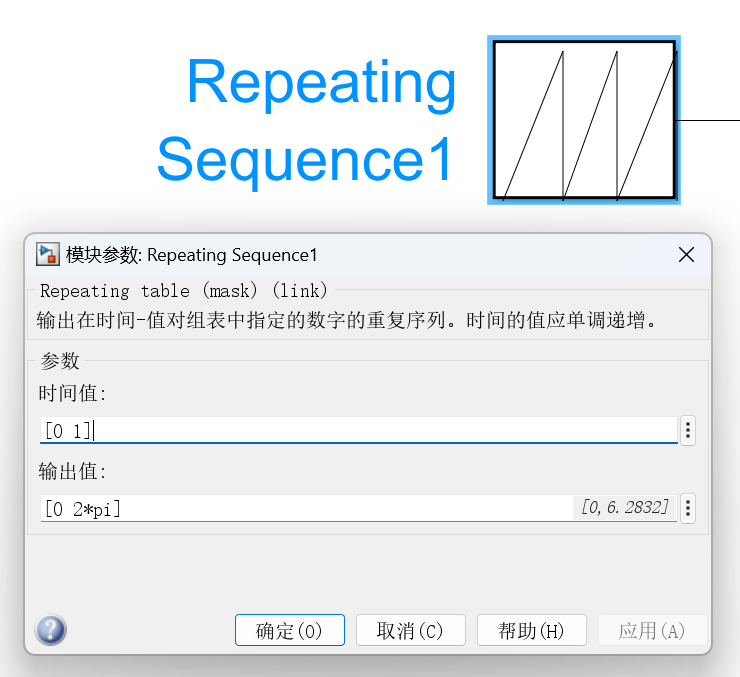
把经过Clarka变换后得到的Iα,Iβ输入到Park变换模块,除此之外还需要一个theta信息,这里使用Repeating Squence模块模拟了一个Theta角度信息0-2pi,
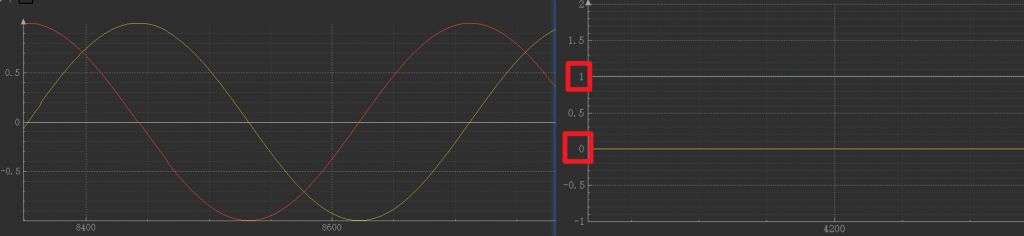
查看变换前后仿真波形:
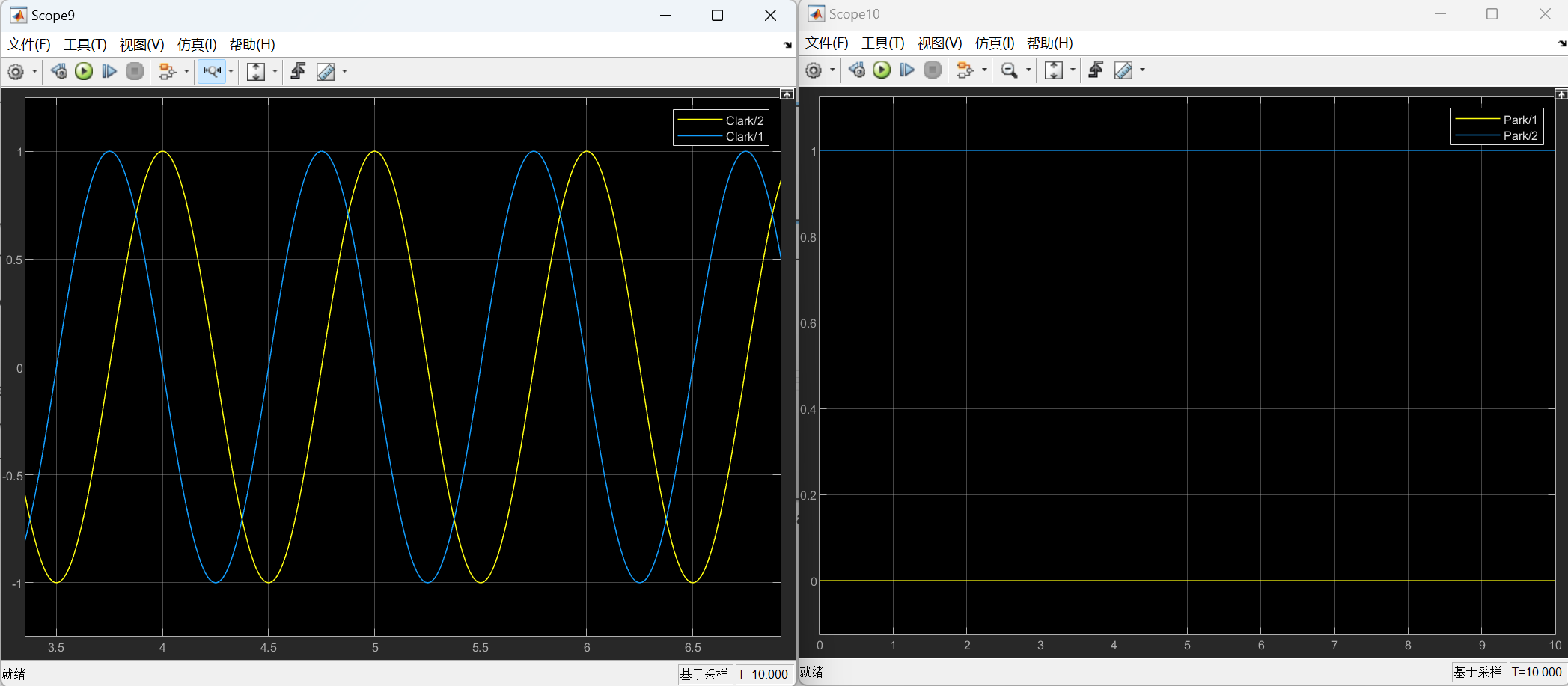
仿真结果和理论预期一致,Park变换之后得到两个常量。
仿真结果符合理论预期之后,接下来开始在单片机上进行实现。
三、MCU软件实现:

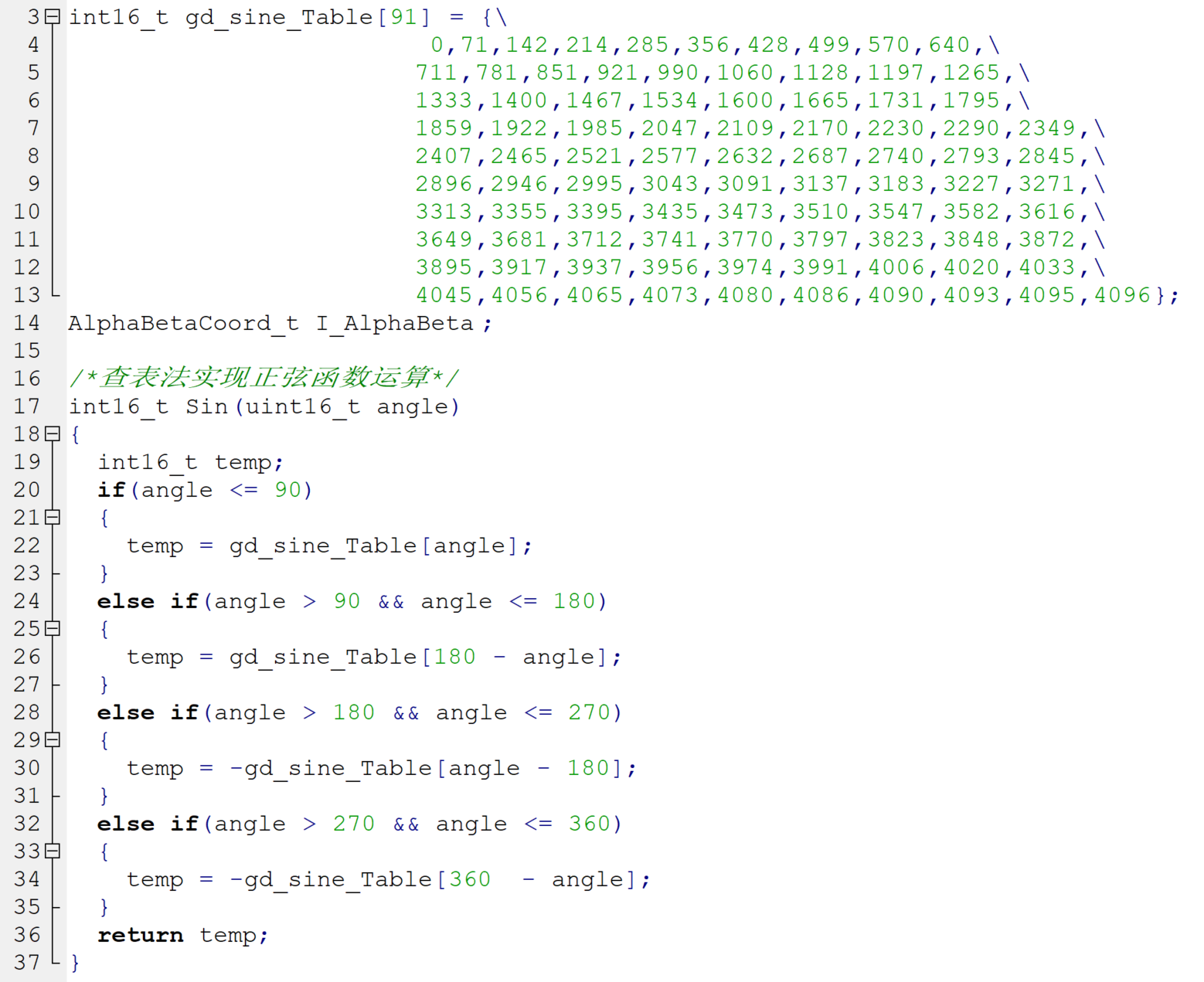
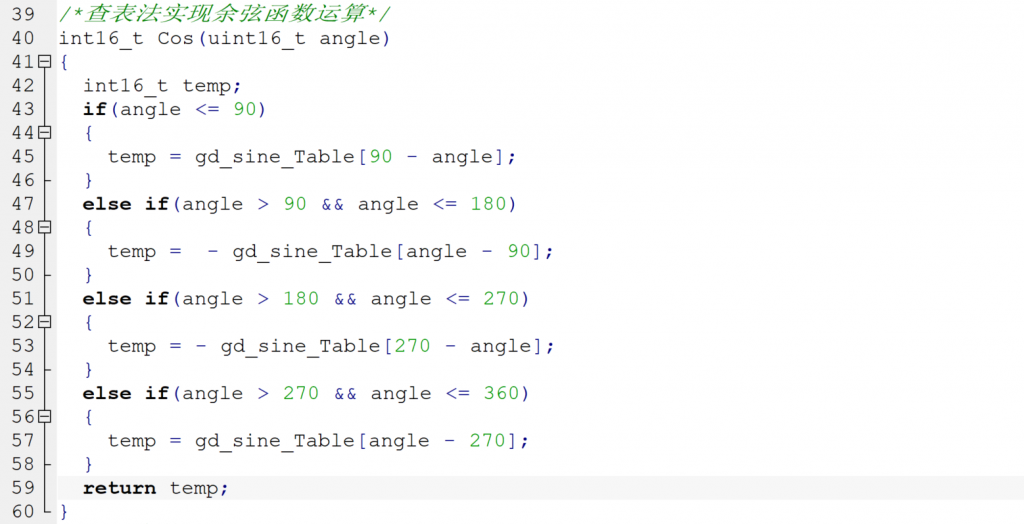
其中Sin和Cos函数实现如下:
其中的结构体定义如下:

调用Park变换函数,打印计算结果通过上位机绘制数据变换波形,可见MCU计算 波形和仿真波形一致:

Park变换至此结束。