
FOC学习笔记(五)—–SVPWM概述
一、SVPWM是什么
我们都听说过PWM,脉冲宽度调制,那么什么是SVPWM呢,与PWM有什么区别呢?
SVPWM实际上就是Space Vector PWM,空间矢量脉宽调制,与PWM不同的是,PWM是通过占空比来调制电压,而SVPWM调制的是一个空间矢量。SVPWM的输出是三路PWM信号,用于控制三相逆变桥的桥臂MOS开关,使得母线电压以不同的方向流入和流出三相绕组,当电流流过三相绕组,根据安培定则,就会在线圈中产生一定大小的方向沿着线圈轴线的磁场,三相绕组就会产生三个磁场,三相绕组在空间上互差120度,所以他们产生的磁场也互差120度,通过使用这三个矢量进行合成,我们就可以得到任意方向和可控大小的矢量,这也就是SVPWM的目的,空间矢量调制。SVPWM模块的输入是Uα和Uβ,也就是我们前面讲过的反Park变换得到的结果,所以要在反Park变换之后讲SVPWM。
二、SVPWM包括什么
SVPWM总体上包含两个模块,第一个是扇区判断,前面说到三相绕组会产生三个磁场,这三个磁场空间互差120度且都可正可负,所以我们把三个坐标轴朝反方向延长,得到六个扇区,每个扇区角度60度。
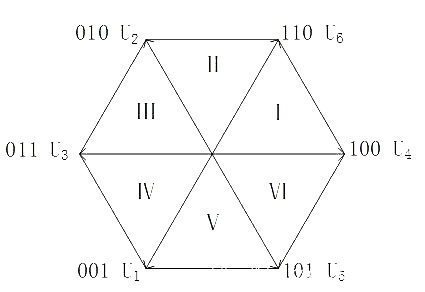
任意方向的矢量都是由图中这六个基本矢量合成,所以我们需要知道合成矢量处于哪个扇区,这样的话我们就知道应该使用哪两个基本矢量去合成目标矢量。这就是我们为什么要进行扇区判断这一步。
第二个是相邻基本矢量的作用时间,我们合成任意矢量的操作是通过伏秒平衡原则来实现的,这一点就类似于PWM的脉宽调制思想,通过在一个周期内控制开和关的时间比例,就可以实现不同电压的等效,这里SVPWM也是一样,通过在一个周期内,控制相邻基本矢量的作用时间(同一时间只能有一个矢量输出),根据矢量的合成法则,平行四边形法则,就可以合成不同方向的矢量,所以我们要根据要合成的矢量的角度去计算相邻矢量的作用时间。再进一步,得到相邻矢量作用时间和扇区,我们就知道在一个周期内,应该怎么控制MOS的开关,开多长时间,关多长时间,最终这些落实到硬件平台MCU上,都表现为三路PWM输出对应定时器的比较值,这是我们的终极目的,得到这三个比较值后,直接给到Timer就可以控制输出对应的PWM驱动全桥控制电机转动。
完成以上两个部分,就可以实现SVPWM模块,幸运的是,扇区判断和相邻基本矢量作用时间,我们都可以通过Uα和Uβ计算得到,所以SVPWM模块就是Uα和Uβ输入,三个定时器比较值输出的模块。
接下来SVPWM会分几篇文章讲解,每一步的理论分析,Matlab仿真和MCU实现。